Der Kalman-Filter
Geht es um autonome Autos geht, um intelligente Radarsensoren oder um Battterietechnik, dann fällt oft der Begriff "Kalman-Filter". Dieser Begriff wird oft mit einem Ehrfurcht erregenden "Ooooh" quittiert, was mehr oder weniger bedeutet "oh jetzt wird es kompliziert".
Eigentlich ist aber nur die mathematische Notation des Kalman-Filters kompliziert. Der Algorithmus und die Implementierung in Software ist es nicht. Dieses Aha-Erlebnis haben dann auch Studierende im Master Mechatronik, die sich im Projekt "Sensor- und Regelungssysteme" Hands On mit einem Kalman-Filter und diesen in einem Roboterfahrzeug zur Anwendung bringen.
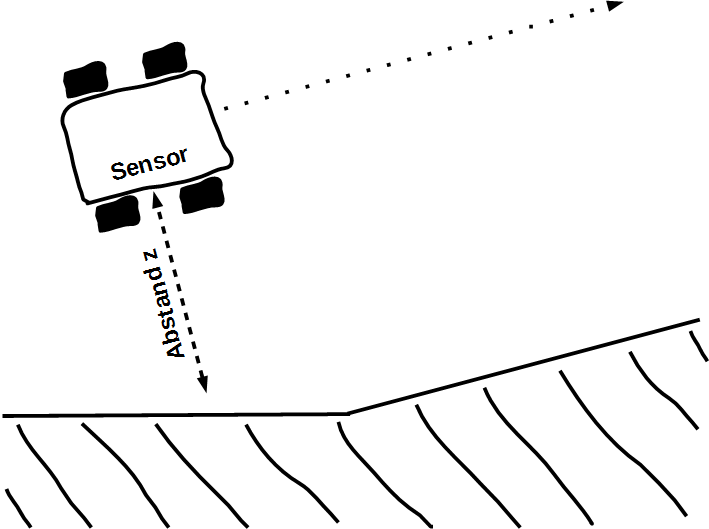
Das Fahrzeug soll, wie in der Zeichnung dargestellt, im konstanten Abstand an der Wand entlang fahren. Der Abstand wird z.B. mit einem am Fahrzeug angebrachten Lidarsensor gemessen und dient als Eingangssignal für eine Regelung.
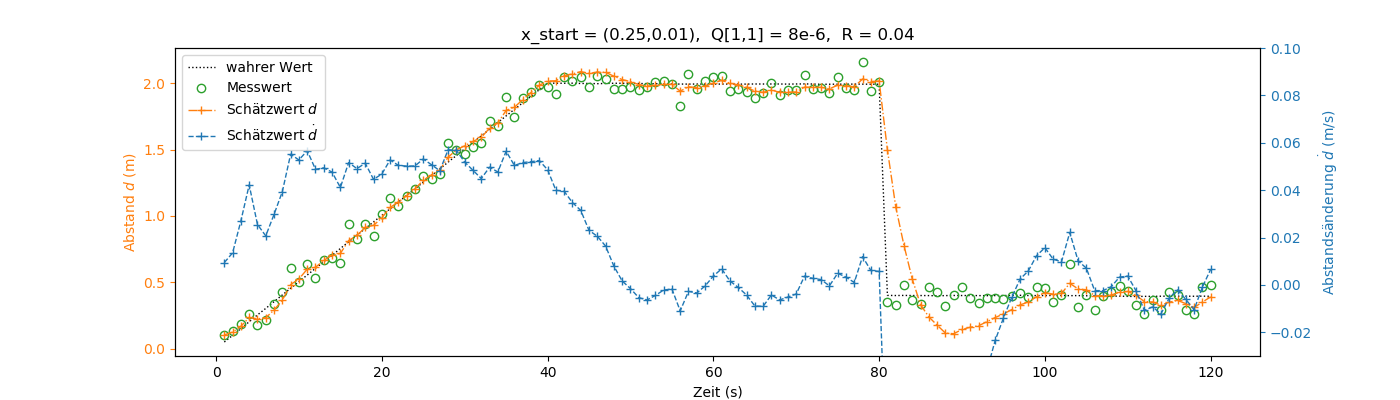
Der Abstandsmesswert besitzt jedoch eine erhebliche statistische Streuung und ist mit häufigen Ausreißern behaftet, welche durch EMV-Probleme oder Fremdlicht verursacht sind. Für die zyklisch anfallenden Messdaten wird also ein Filter benötigt, der die Messwertstreuung reduziert und insbesondedere die "Ausreißer" entsprechend wenig gewichtet.
Zudem verfügt die Wand über Nischen, denen das Roboterfahrzeug folgen soll. Daher kommt eine gleitende Mittelwertbildung nicht in Frage. Denn ein tatsächlicher Sprung der Abstandsmesswerte muss unmittelbar erkannt werden.
Außerdem soll mit nur einem 1D-Abstandssensor erkannt werden, ob das Fahrzeug gerade parallel oder schräg zur Wand fährt.
Dies ist das optimale Einsatzgebiet eines Kalman-Filters. Ein Kalman-Filter wird aber nicht nur dazu verwendet, um bei einem Messsignal das Rauschen zu reduzieren. Mit einem Kalmanfilter kann man auch Zustandsgrößen eines Systems schätzen, welche durch eine Sensormessung gar nicht zugänglich sind. Im Beispiel des Roboterfahrzeugs kann beispielsweise der Winkel des Fahrzeugs zur Wand geschätzt werden, für dessen Messung ansonsten zwei Abstandssensoren nötig wären. Darüber hinaus können mit einem Kalmanfilter mehrere Sensormesswerte fusioniert werden: Würde das Roboterfahrzeug sowohl den Abstand als auch die Relativgeschwindigkeit zur Wand mit einem Radarsensor messen, dann kann mit einem Kalman-Filter der Wandabstand noch genauer geschätzt werden.
Die Studierenden befassen sich in zwei Stufen mit dem Kalman-Filter:
- In Jupyter-Notebooks (Python) entwickeln Sie Schritt für Schritt einen Kalman-Filter und testen diesen an simulierten Sensordaten.
- Mit dem durch die Jupyter-Notebooks erworbenen Grundwissen implementieren die Studierenden anschließend einen Kalman-Filter in einem Simulink-Modell, erzeugen daraus Code für einen Einplatinencomputer und testen den Filter an einem Roboterfahrzeug.
Die Reihe von Jupyter-Notebooks hierzu finden Sie auf einem GitHub Repository.